Datasets with differents trayectories in an outdoor scenario
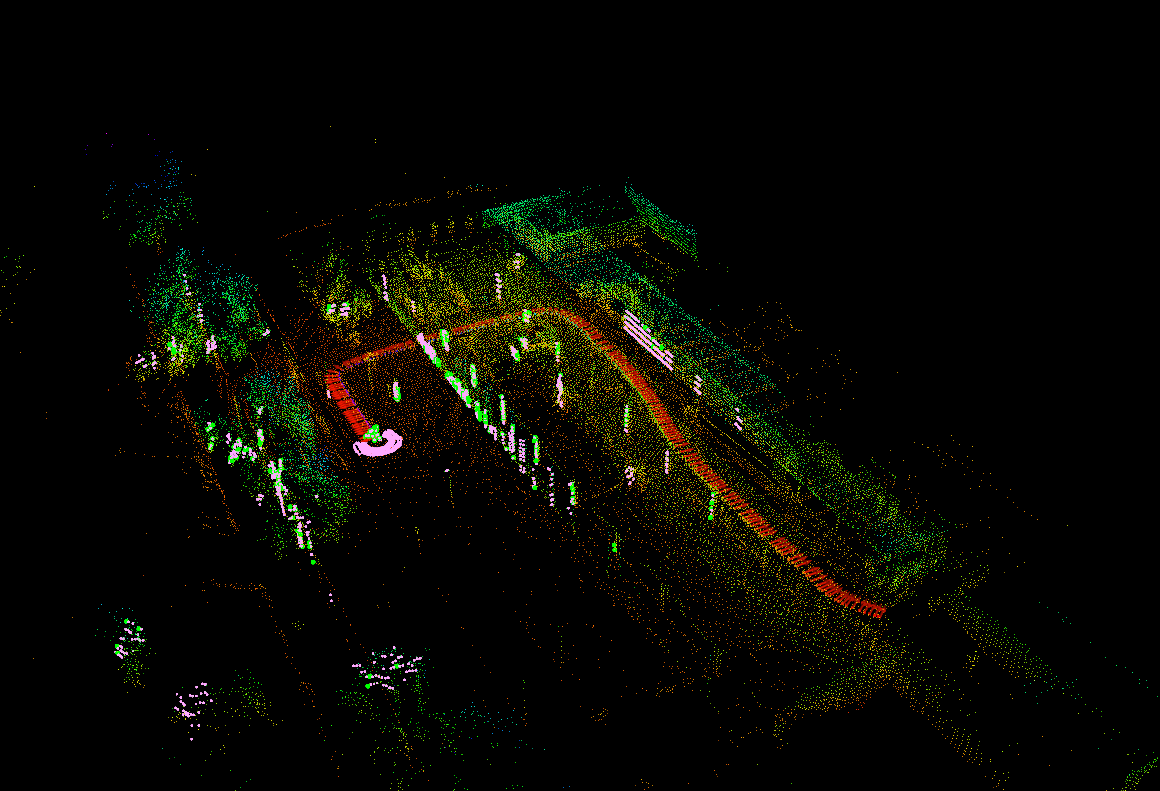
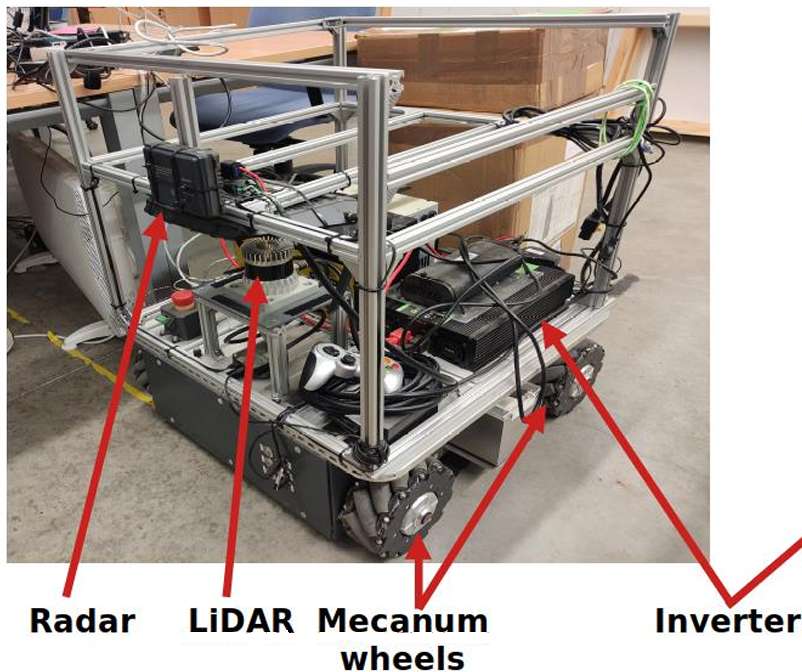
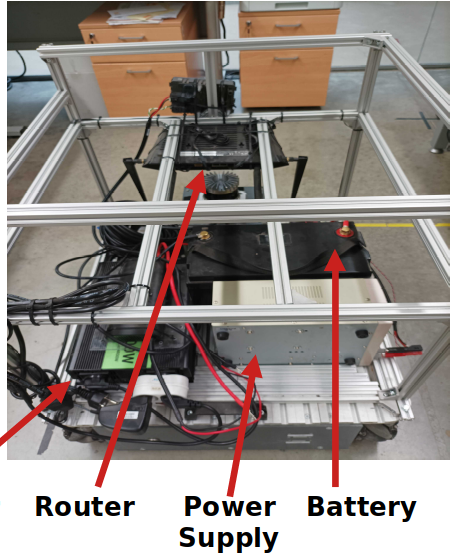
We present a dataset obtained using our robotic platform ARCO. This project was conducted by the "Service Robotics Lab" at Pablo de Olavide University. The dataset captures various trajectories within a structured environment characterized by an open building with partial overhead coverage.
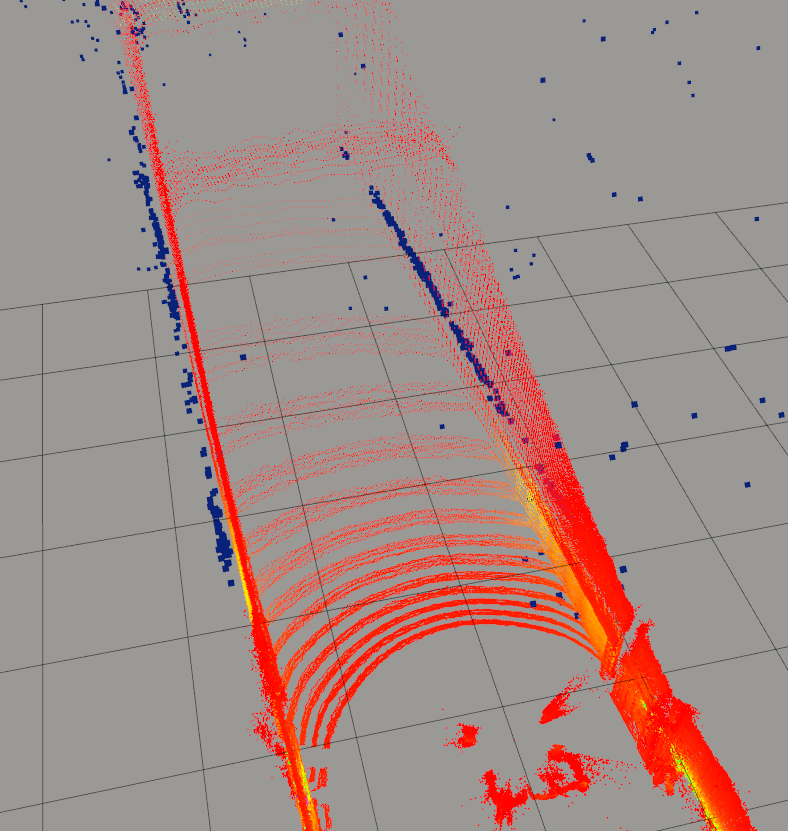
This datasets includes measurements from LiDAR, radar, and IMU sensors, proving invaluable for designing and testing localization and mapping algorithms reliant on radar sensors, particularly in challenging scenarios such as adverse weather conditions.
The radar data was obtained using a driver developed by our group. For more information about this driver, please refer to the repository "ARS_548_RDI Driver", where you can also access custom messages included in the bags related to object detection. Additionally, an approximate baseline was generated using the "LeGO LOAM-SR" library, providing a precise trajectory based on LiDAR data, serving as a reliable benchmark for evaluating different algorithms.
The data is carefully timestamped and stored using the ROS2 (Robot Operating System 2) package, guaranteeing compatibility and user-friendly access. Detailed descriptions of each file's contents are available in the provided section, facilitating efficient navigation and utilization of the dataset.
Copyright
All datasets and benchmarks on this page are copyright by us and published under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 License. This means that you must attribute the work in the manner specified by the authors, you may not use this work for commercial purposes and if you alter, transform, or build upon this work, you may distribute the resulting work only under the same license.

Citation
Please cite our paper ARS 548 RDI radar driver if you use the dataset for your research. It would be more than welcome!!
Acknowledgements
This work is partially supported by the grants INSERTION PID2021-127648OB-C31 and NORDIC TED2021-132476B-100, funded by Spanish’s MCIN/AEI/10.13039/501100011033 and the “European Union NextGenerationEU”/”PRTR”.