About me
"To Infinity and Beyond!" Toy Story, 1995

|
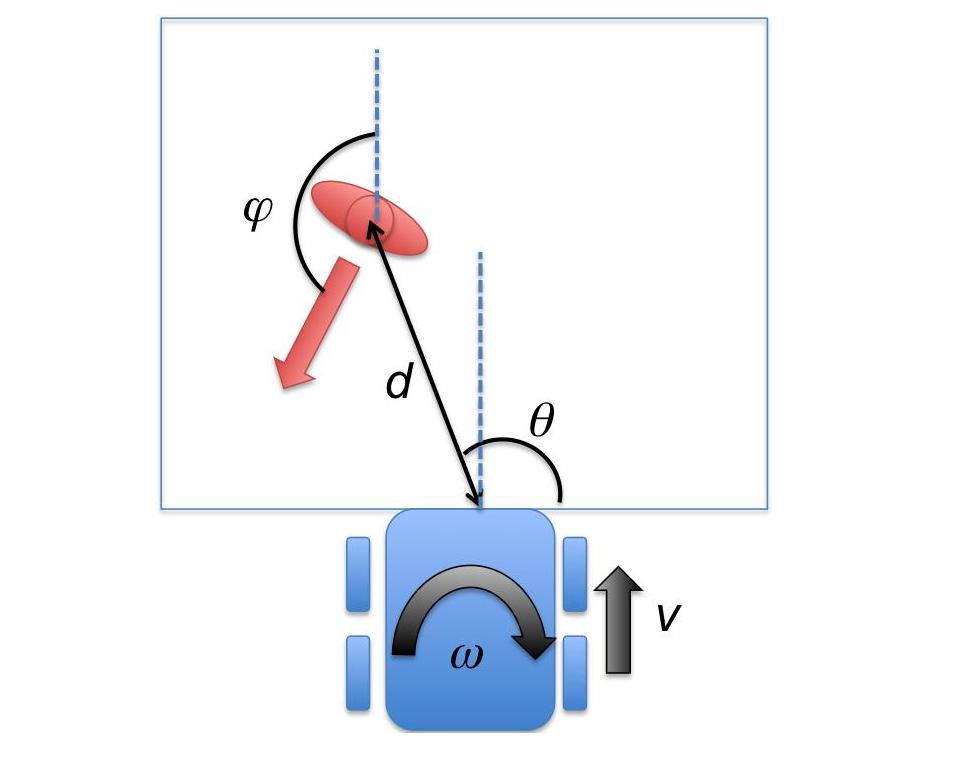
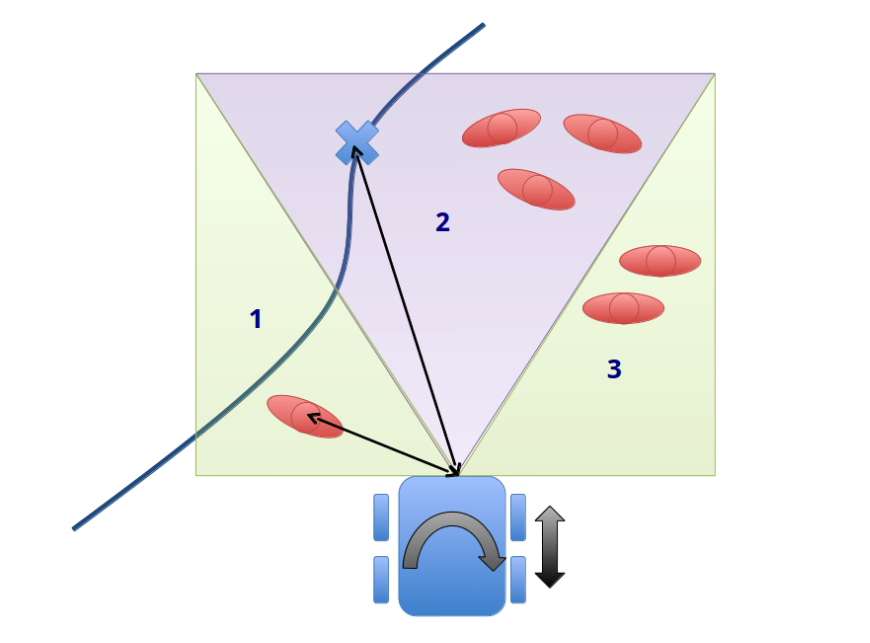
Currently, I am a Postdoc Researcher in the Service Robotics Lab at the Pablo de Olavide University of Seville. My research is focused on Social Navigation of Mobile Robots. I am studying the different robot navigation algorithms and trying to extend them by adding social skills. To do that I employ machine learning techniques in order to learn navigation behaviors from data of real people as well as their movement patterns.
After receiving the Computing Engineering Degree I was working and collaborating with the Automatics, Robotics and Mecatronics research group of the University of Almeria (my hometown) for almost 3 years. Apart from the Robotics field, I am interested in Rock music (live music is a plus), doing sport enjoying the nature (trial running), drawing in my spare time, and I am always willing to grab a beer with friends. |
|---|