
The SSM-Track: Star, Sun & Moon Tracker project focuses on developing an advanced software solution for the localization of drones using visual cues from celestial bodies—stars, the Sun, and the Moon—as alternatives to traditional GNSS systems. The approach is particularly suited for applications in which GPS signals are vulnerable to critical interferences such as spoofing or jamming, providing a resilient and independent means of navigation. Drawing inspiration from classical celestial navigation methods used in maritime exploration, the project translates these principles into a modern context for unmanned aerial vehicles (UAVs), reliable geolocation through onboard visual sensing and celestial modeling even under GNSS-compromised conditions. The system developed, while tested in serial vehicles, could be extended for its application in the spatial segment.
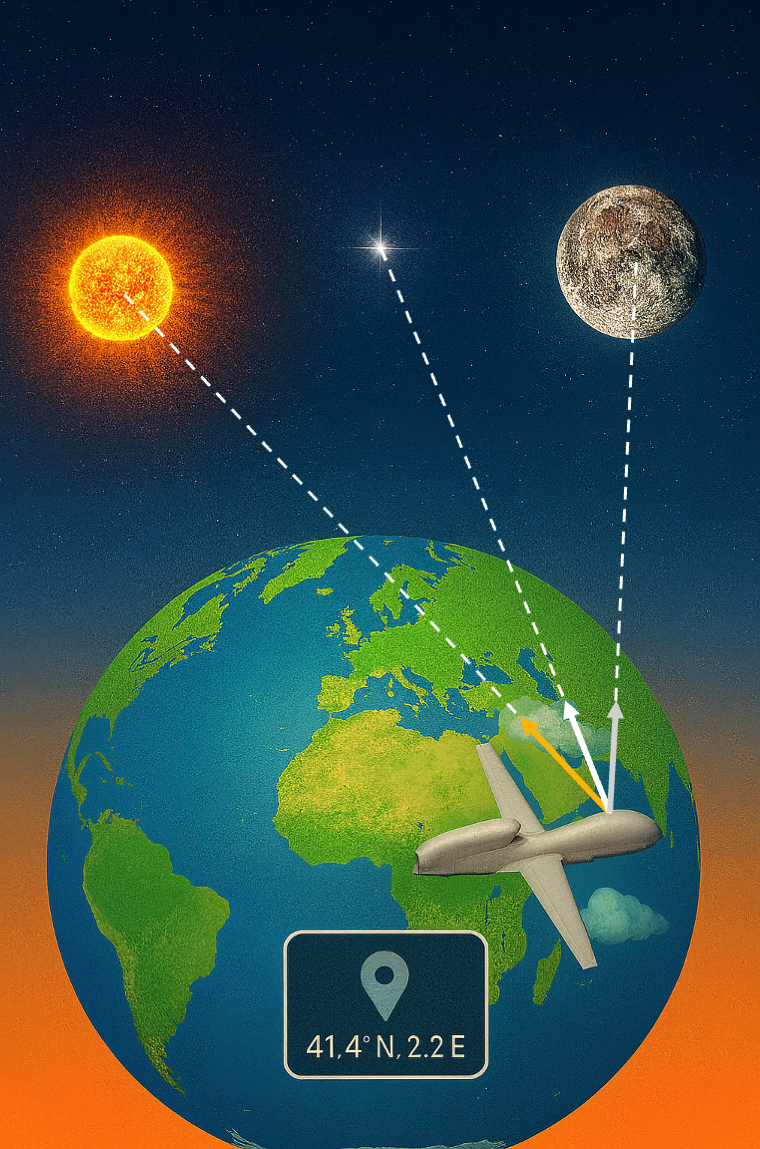
Technically, the system comprises three independent but complementary modules: a star and moon tracker for night-time localization, and sun trackers for day operations. Each module is designed to extract the position of the corresponding celestial body from camera imagery, using precise timestamping and attitude/altitude metadata. The star tracker detects and identifies stellar patterns to compute the UAV’s absolute location by matching star constellations with astronomical databases. Meanwhile, the sun and moon trackers estimate directional vectors convert them into normalized vectors relative to the drone’s reference frame.
- Running period: 2024-2025
- Funding agency: TII: Technology Innovation Institute