
Research Highlights
We research on different lines related to perception, decision making and adaption in robotic systems, including multi-robot systems. Here we highlight some of them:
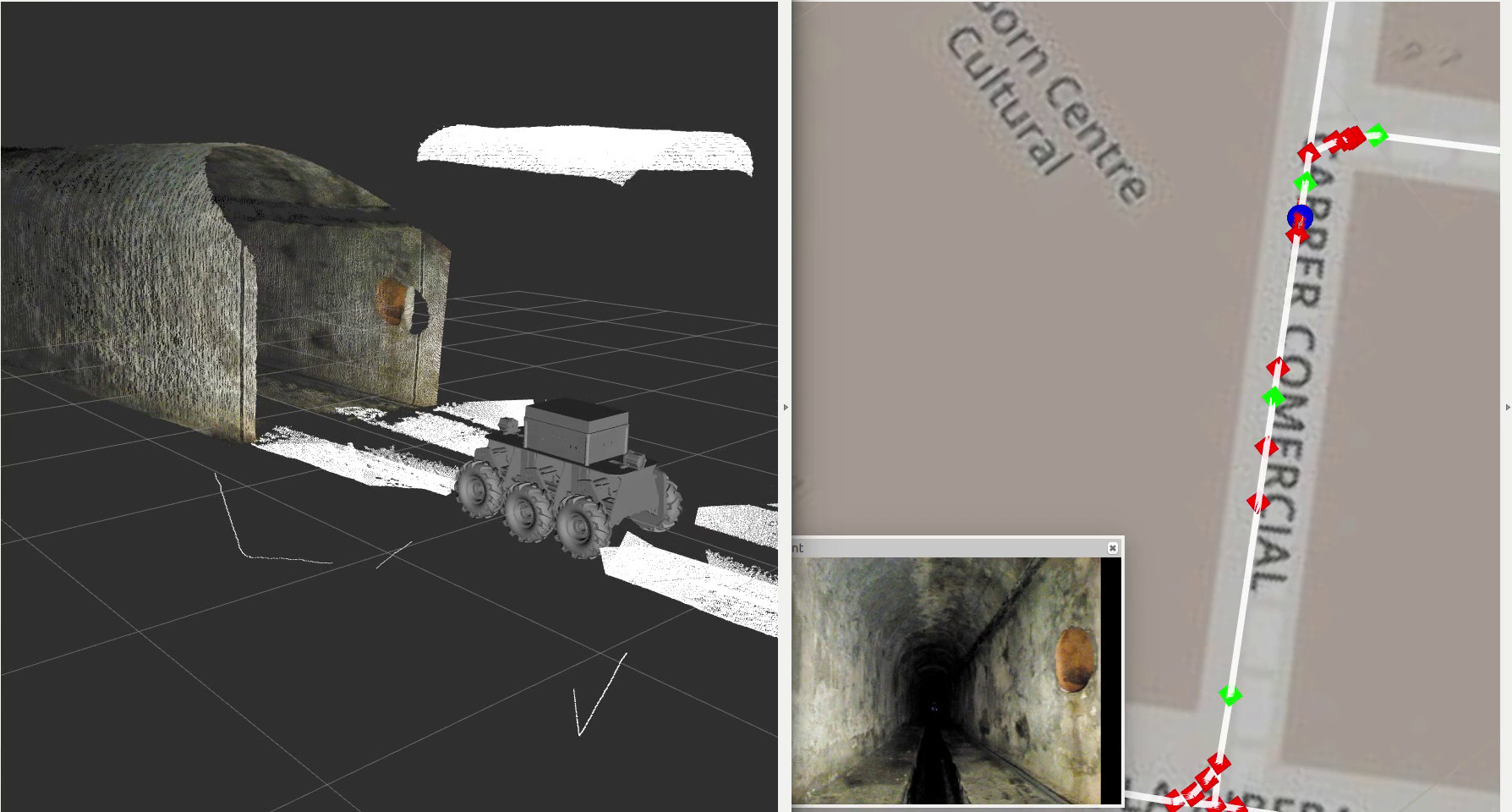 |
Robot Localization, Mapping and SLAMIt is essential for an autonomous robot to acquire knowledge about its position in order to be able to fulfill its commanded tasks. To this end, our group has a remarkable background on developing algorithms for robot localization when there exists prior knowledge of the topology of the environment as done here and here. In cases in which this knowledge is not available or not given to the robot, Simultaneous Localization And Mapping(SLAM) algorithms should be employed, as done in our works Vision-Based Odometry and SLAM and Range Only SLAM. |
 |
Robot Autonomous NavigationWe have a long experience on robot autonomous navigation techniques and systems, for both ground and aerial robots, with an special focus on real-life deployments. We have deployed robots for autonomous transportation of persons in pedestrian areas, autonomous inspection of sewers, guiding of persons in cultural heritage sites and touristic places,
|
 |
Robot Decision Making under UncertaintiesRobots have to face uncertainties when performing their tasks. Uncertainties arise due to sensor noise, occlusions, inaccurate models, failures, etc. We work in the use of Partially Observable Markov Decision Processes (POMDPs) as principled tools for planning under uncertainties in robotics. We have developed techniques based on POMDPs for single and multi-robot systems. |
 |
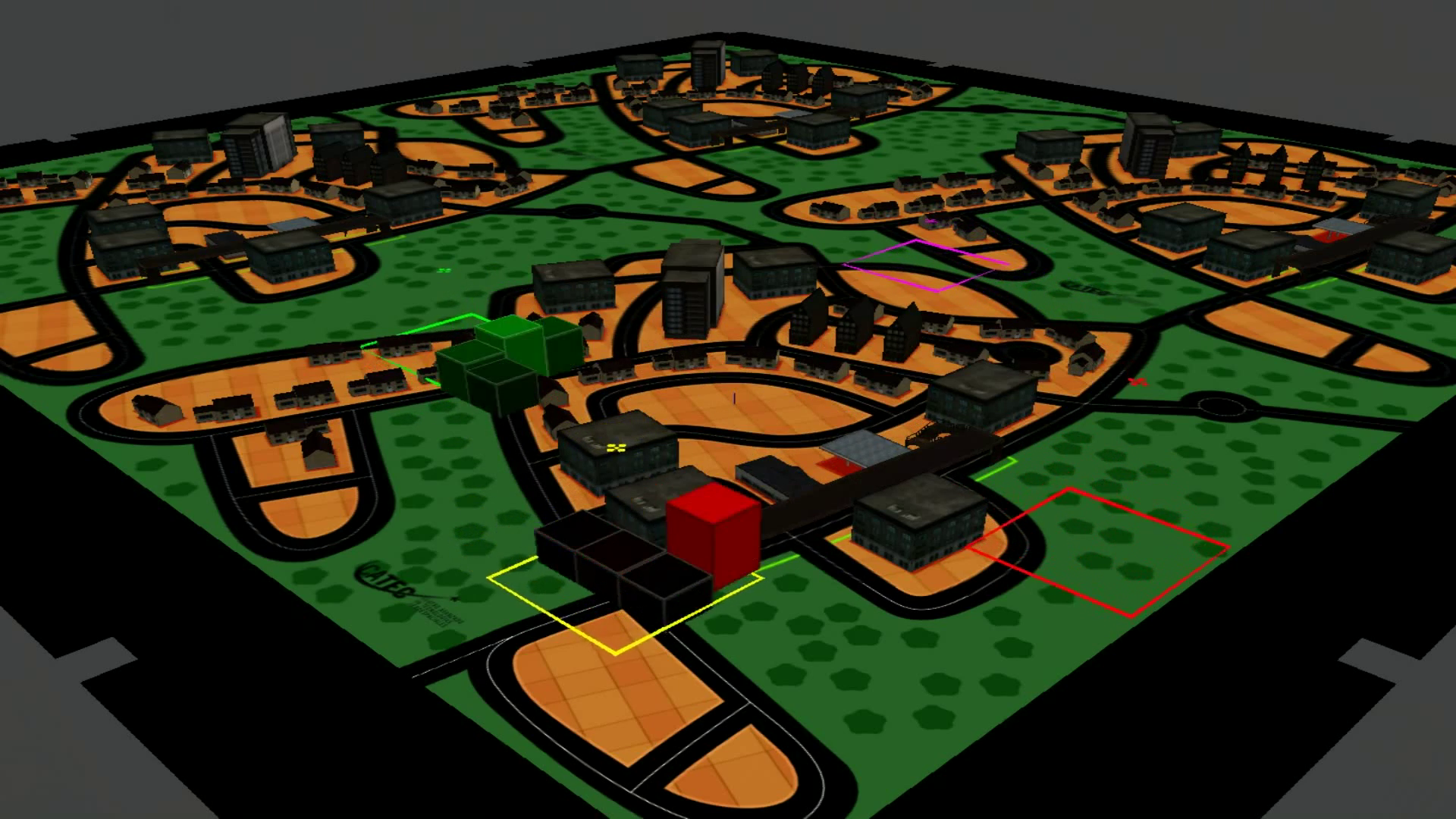
Exploration and Active SensingOne of the definitions of exploration is “the act of searching for the purpose of discovery of information or resources”. We have developed different algorithms for efficient mapping of unknown environments. For instance, myopic strategies for range-only mapping can be found here . Also, we have developed novel non-myopic informative path planning and multi-robot planning strategies for exploration using Gaussian Processes as models. |
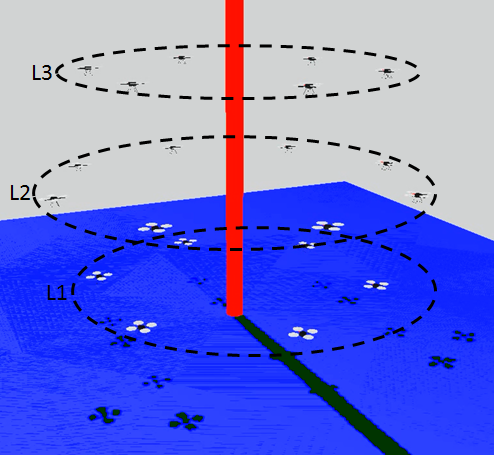 |
Multi-Robot SystemsIn applications such as mapping, surveillance and search and rescue, to name a few, the use of a system with multiple robots can be of great interest. For this reason, we have designed algorithms to coordinate heterogeneous teams of robots in several publications including here and here. Also, the works here and here discuss about some of the advantages when using such multi-robot systems. |
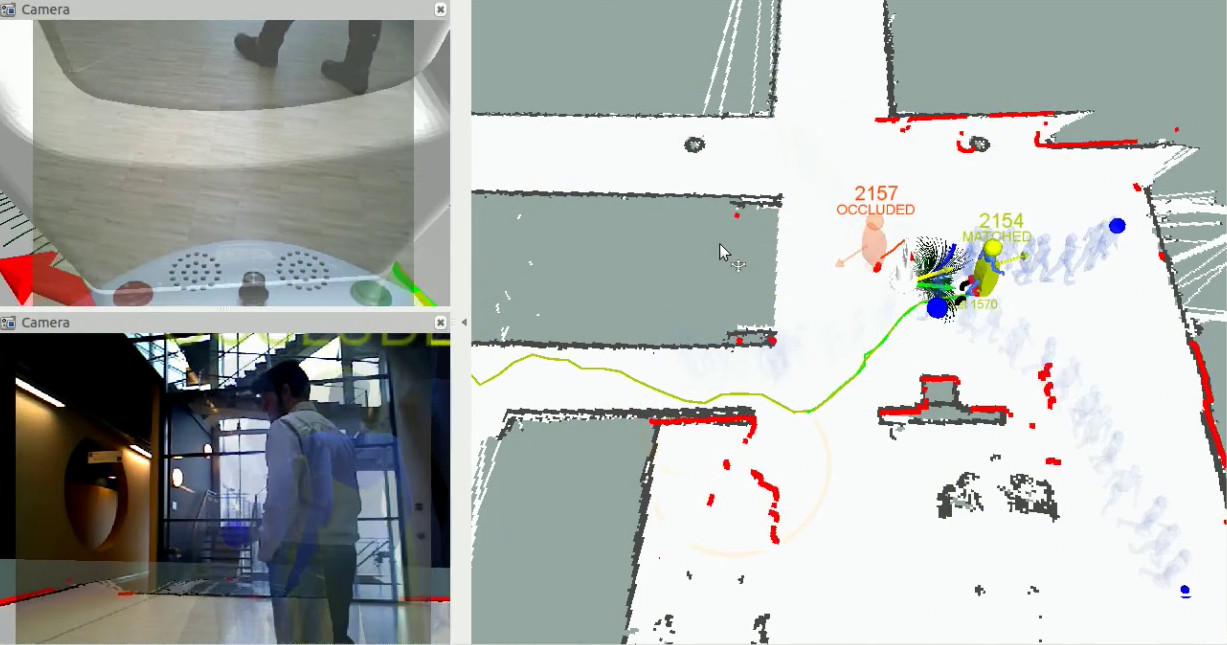 |
Social RoboticsWe also research on robot navigation systems that consider persons in a proper way, taking into account not only safety constraints, but also social rules, in what is called human-aware navigation. For that, we have developed novel algorithms that learn these social constraints and costs from data, and can be incorporated into motion planners like RRT* (see below) We have also develop methods to consider people intentions when performing joint navigation tasks. We have developed such systems in real setups considering social settings, like here and here. |
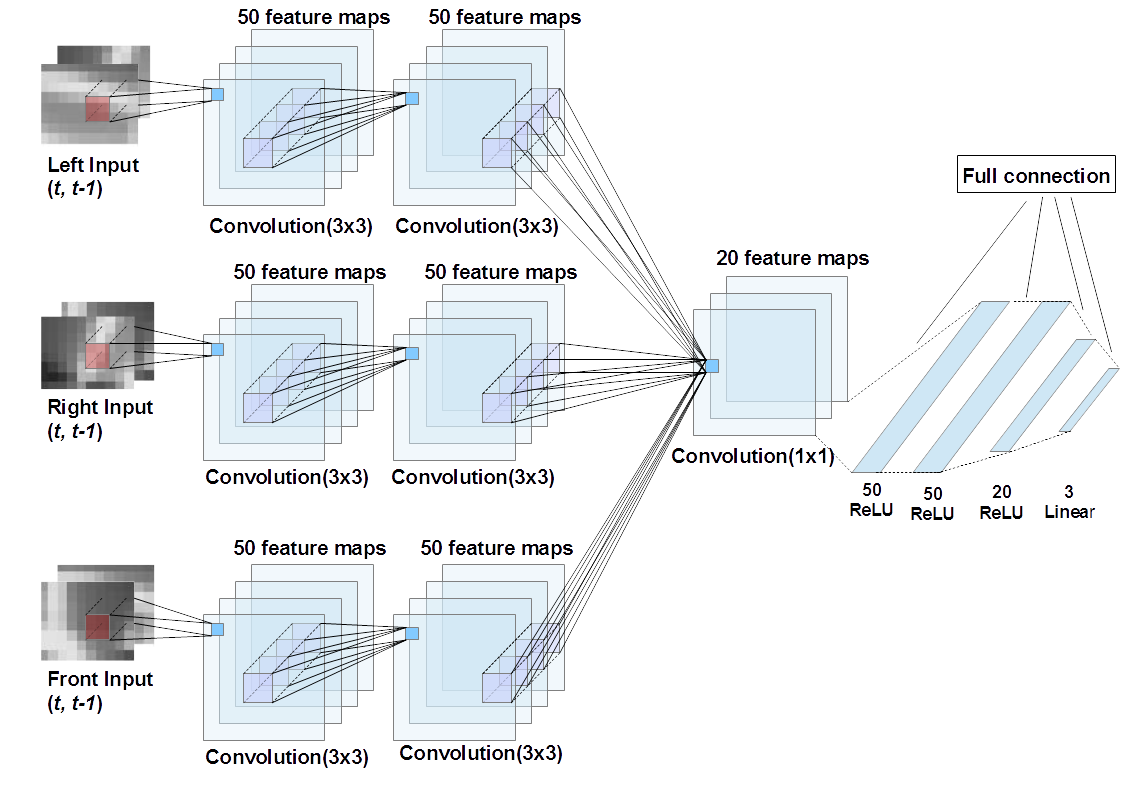 |
Machine Learning for RoboticsSome robotics tasks are easier to demonstrate than to program. Thus, we have worked on methods for robot programing by demonstration applied to robot navigation using Inverse Reinforcement Learning with RRT planners (here, and the code here). We are also applying Deep Networks for robot vision tasks, like vision-based velocity estimation for UAVs or identification of sewer elements for robot localization.
|
Application Areas
We have applied the previous techniques and developed robotic and vision systems in different applications areas. We show here some examples:
 |
Service Robotics for Personal/Domestic UseSocial Robots devoted to edutainment |
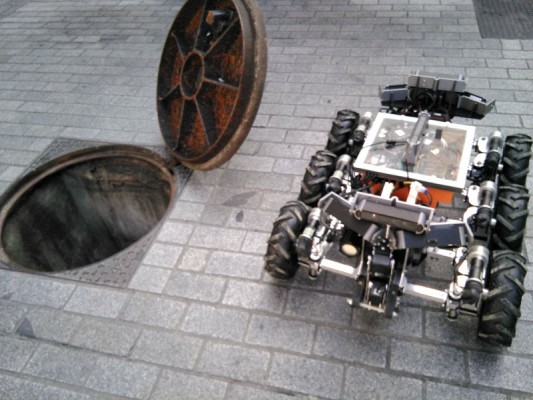 |
Service Robotics for Professional UseInspection applications |